团队简介:
团队成立于2010年,现有成员20余人,含正教授3人、副教授5人、博士3人、研究生17人,10名成员具博士学位,专注人工智能及具身智能安全前沿研究,深耕具身智能系统感知、认知、决策与控制的深度融合,主要开展人工智能、具身智能安全相关研究。依托自主智能技术与系统研究院,在人机交互、智能控制、安全保障领域推进应用基础研究,为解决智能系统复杂环境自主行为、人机协作、安全防护等行业关键问题提供创新方案。团队已完成国家自然科学基金9项、其他各级项目40余项;获罗马尼亚科学院科技成果奖1项、省部级奖5项及其他国内外奖励7项;出版英/中文专著3部,发表SCI论文100余篇(含ESI2篇、IEEE汇刊15篇)及其他论文200余篇,申请美国专利2件、中国专利60余件。未来将深化具身智能系统及安全理论研究,培养高层次人才,力争达国际先进水平,助力行业发展。
代表性成果:
国家自然科学基金项目:(项目批准号:61972324)
移动机器人控制膜计算模型构建机制
一、项目概况:
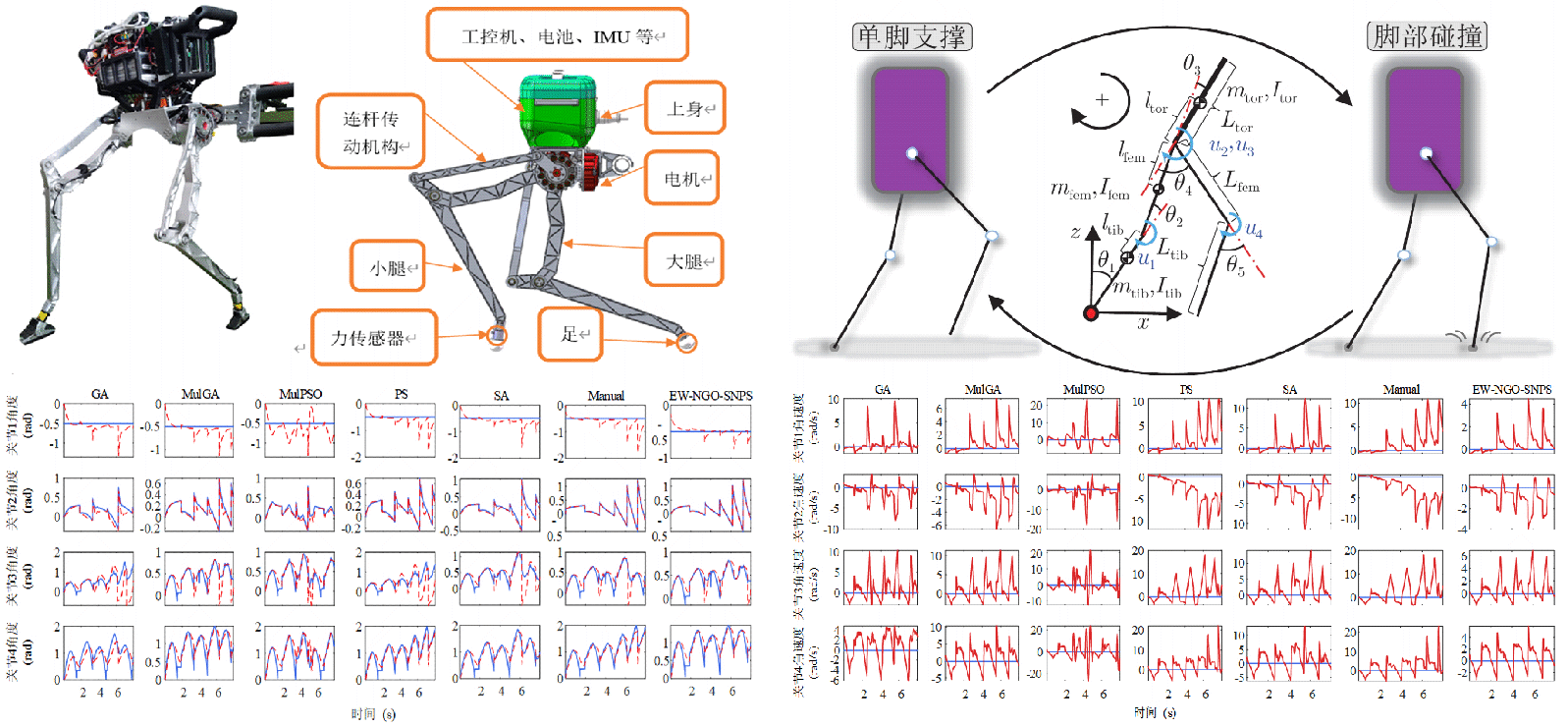
本项目基于仿人智能控制理论,旨在研究双足机器人的行走控制,以提高其在各种环境中的行走性能。针对平整地面、不平整地面、坡面和台阶地形,设计了不同的控制方法。这些方法在复杂度上呈现出递进关系,从简单到复杂,从而为双足机器人在不同地形下实现稳定行走提供了有效的解决方案。
二、研究目标:
本项目深入研究并开发针对不同地形的双足机器人行走控制方案,以提高不同地形下双足机器人行走控制的效果和稳定性。
三、拟解决的关键科学问题:
(1)如何将简单有效的方法与先进技术相结合,以提高双足机器人行走控制效果。
(2)如何综合运用多种方法解决单一的控制方式无法同时满足多方面的控制需求。
(3)如何设计适用于不同地形需求的控制算法,以实现双足机器人在各种环境下的稳定行走。
论文成果1:
2024年发表于International Journal of Neural Systems(IF=7.3,中科院一区TOP,CCFA)的论文“Entropy-weighted numerical gradient optimization spiking neural system for biped robot control[J]”。
论文信息:
Xingyang Liu, Haina Rong*, Ferrante Neri*, Zhangguo Yu, and Gexiang Zhang. Entropy-weighted numerical gradient optimization spiking neural system for biped robot control, International Journal of Neural Systems, 2024, 34(6): Article No. 2450030. DOI:10.1142/S0129065724500308.
论文成果2:
2024年发表于IEEE Transactions on Automation Science and Engineering (IF=6.4,中科院二区)的论文“Human-simulated intelligent walking control for biped robots”。
论文信息:
Xingyang Liu, Haina Rong*, Ferrante Neri*, Kuize Zhang, Qiang Yang, Zhangguo Yu, Gexiang Zhang. Human-simulated intelligent walking control for biped robots, IEEE Transactions on Automation Science and Engineering, 2025, vol. 22, 3237-3251. DOI: 10.1109/TASE.2024.3391358.
论文成果3:
2023年发表于Integrated Computer-Aided Engineering (IF=5.3,中科院二区)的论文“A human-simulated fuzzy membrane approach for the joint controller of walking biped robots[J]”。
论文信息:
Xingyang Liu, Gexiang Zhang*, Muhammad Shahid Mastoi, Ferrante Neri*, Yang Pu. A human-simulated fuzzy membrane approach for the joint controller of walking biped robots. Integrated Computer-Aided Engineering, 2023, 30(2): 105-120.
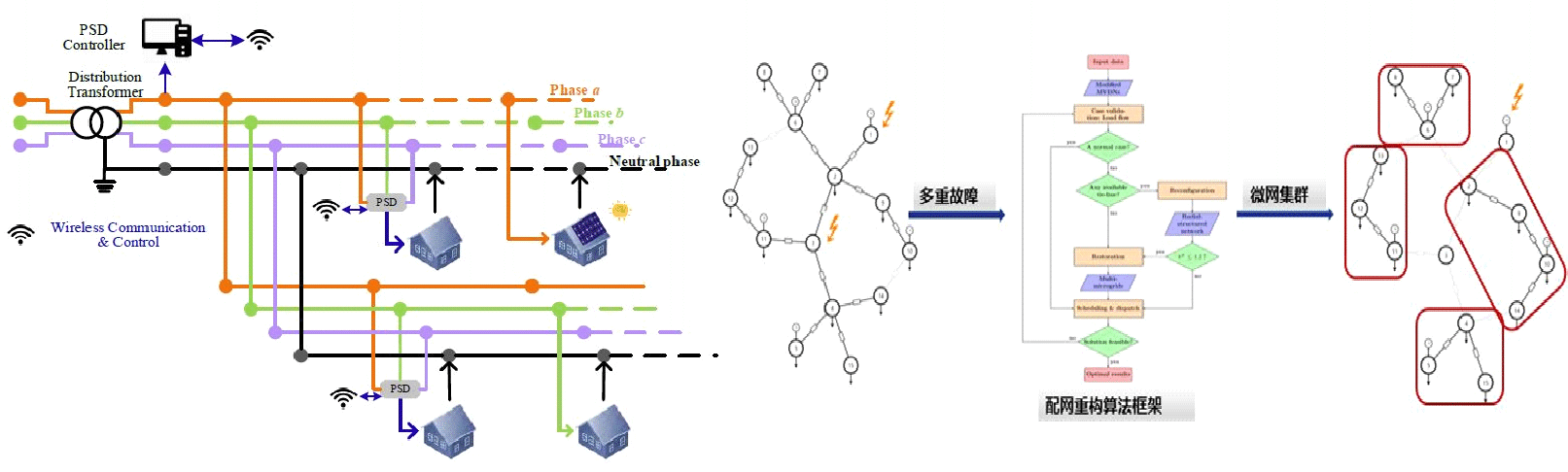
Optimal Restoration of An Unbalanced Distribution System into Multiple Microgrids Considering Three-Phase Demand-Side Management,”IEEE Transactions on Power Systems, 2021. DOI 10.1109/TPWRS.2020.3015384(中科院一区TOP)
该成果针对三相不平衡配电网供电恢复问题,提出基于三相需求侧管理(T-DSM)的多微网集群运行优化方案。其考虑配电网三相不平衡特性,建立相关三相潮流模型,还提出新三相负荷均衡方法,可动态优化负荷相位以降不平衡度、提可靠性与恢复效率。仿真显示,T-DSM能显著降低分布式电源电流不平衡度,所提策略可大幅提升负荷持续时间及系统负荷水平,既增强有源配电网安全稳定性,又保障策略有效持续,为实际应用提供可靠方案。